Method
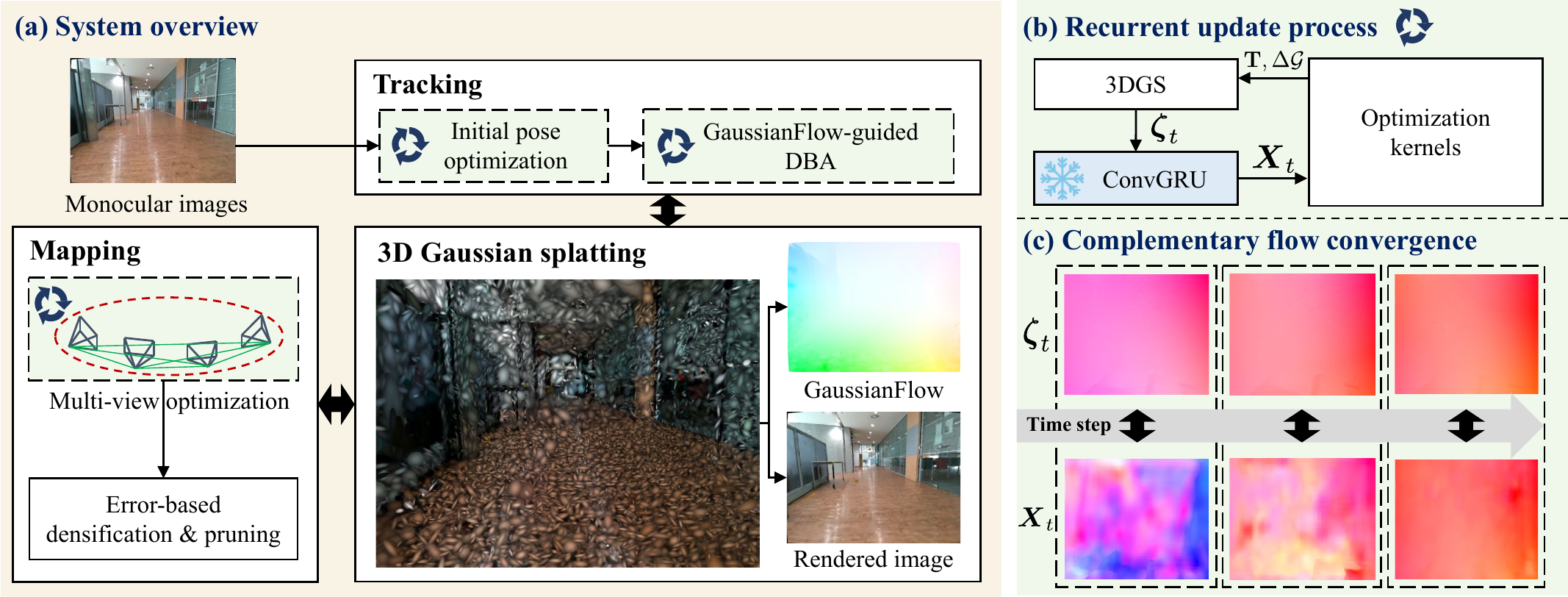
GaussianFlow SLAM is a monocular 3D Gaussian Splatting SLAM framework that uses dense optical flow as a geometry-aware cue for optimizing the 3DGS map and camera poses. Given incoming monocular images, the system alternates between tracking and mapping while maintaining a shared 3DGS map. By aligning GaussianFlow with dense optical flow, the system provides structural supervision even without depth measurements. This allows the Gaussians to move toward geometrically consistent positions while also providing feedback for pose estimation.
Our pipeline consists of three recurrent optimization modules: initial pose optimization, GaussianFlow-guided dense bundle adjustment, and multi-view Gaussian optimization. In each recurrent update, GaussianFlow rendered from the current 3DGS map is fed into a ConvGRU-based optical flow module, which predicts refined optical flow. The resulting flow is then used by optimization kernels to update either the camera poses or the 3DGS map. The optical flow and GaussianFlow progressively converge toward geometrically consistent correspondences.
To further improve map quality, we introduce normalized error-based densification and pruning. These modules selectively split under-reconstructed Gaussians and remove unstable floaters using per-Gaussian errors. This helps produce more accurate geometry, cleaner reconstructions, and better pose estimation.